|
I am a 3rd year Ph.D. candidate at EEE, NTU in Singapore, supervised by Prof. Lihua Xie. I obtained both my master (2021) and bacholors (2018) degree at AIAR in XJTU, supervised by Prof. Shaoyi Du. I joined a double degree program from 2016-2018 and got the Diplôme d'Ingénieur from CentraleSupélec. |

|
|
I'm interested in pose estimation problems in robotics. Recently I've been especially keen on certifiably pose estimation e.g., algorithms w/ non-degeneracy and observable correctness certificates.
|
|
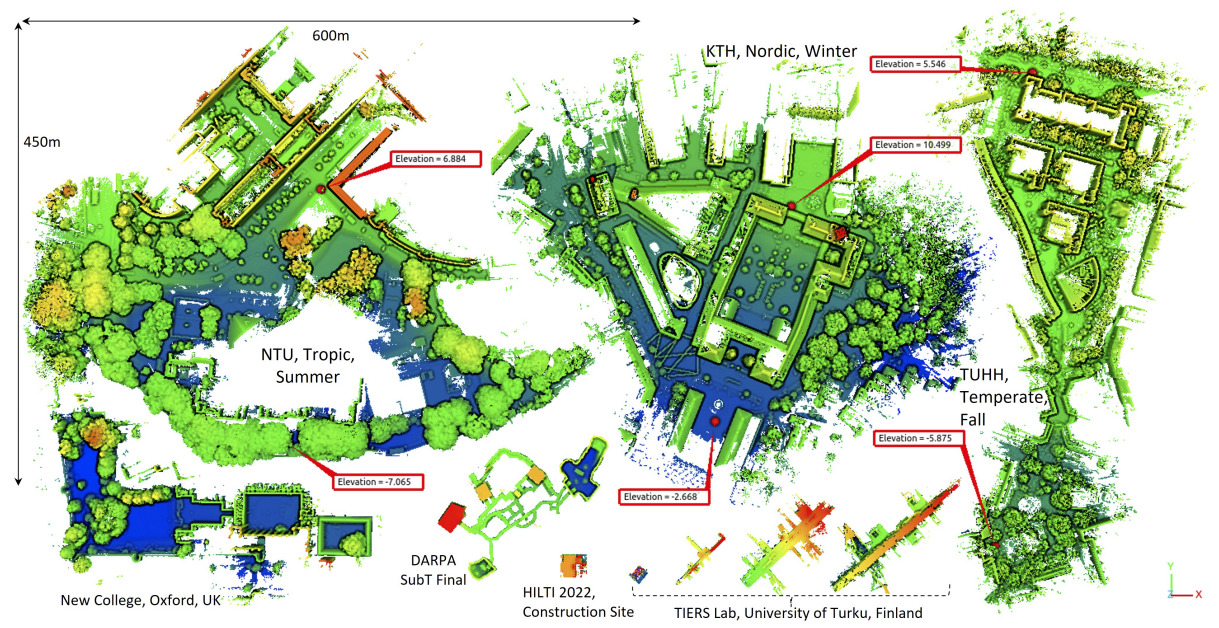
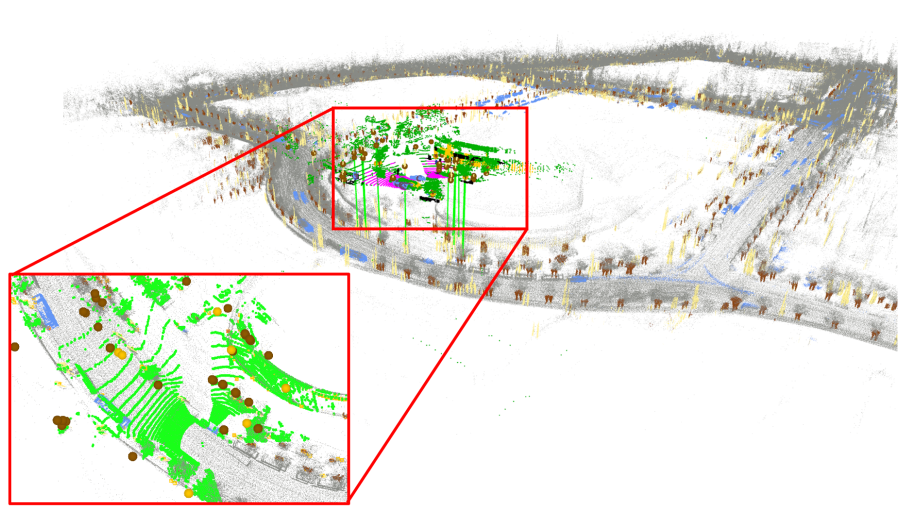
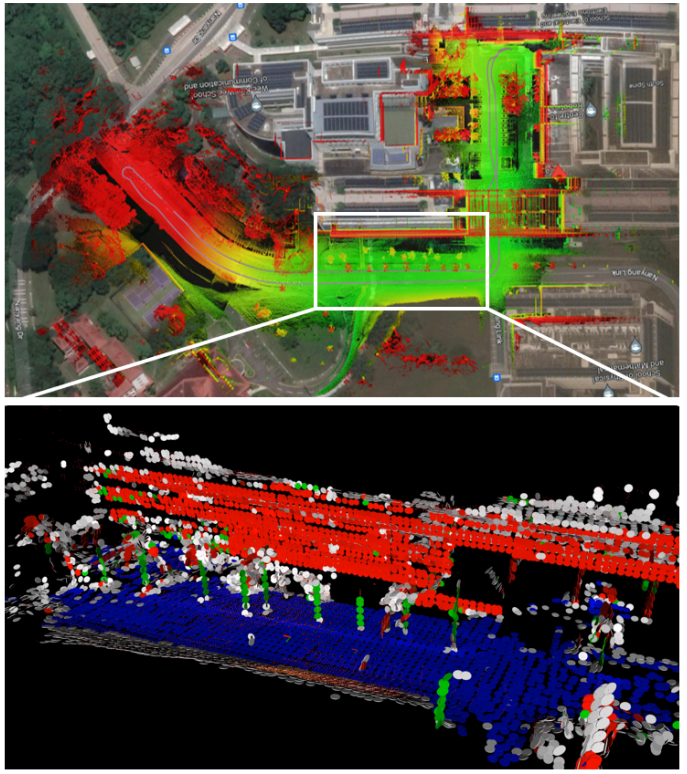
Thien-Minh Nguyen, Shenghai Yuan, Thien Hoang Nguyen, Pengyu Yin, Haozhi Cao, Lihua Xie, Maciej Wozniak, Patric Jensfelt, Marko Thiel, Justin Ziegenbein, Noel Blunder CVPR, 2024 Website / Github / arXiv Data set for semantic SLAM and segmentation with a focus on NRE (Non-Repetitive Epicyclic) LiDar. |
|
Pengyu Yin, Haozhi Cao, Thien-Minh Nguyen, Shenghai Yuan, Shuyang Zhang, Kangcheng Liu, Lihua Xie ICRA, 2024 Code / arXiv One-shot LiDAR global localization leveraging substructures of 3D scene graphs. |
|
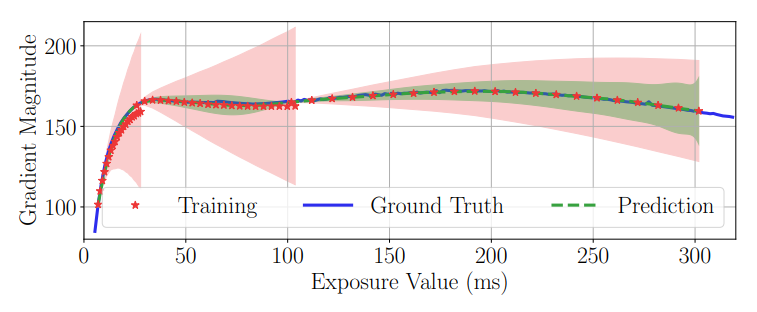
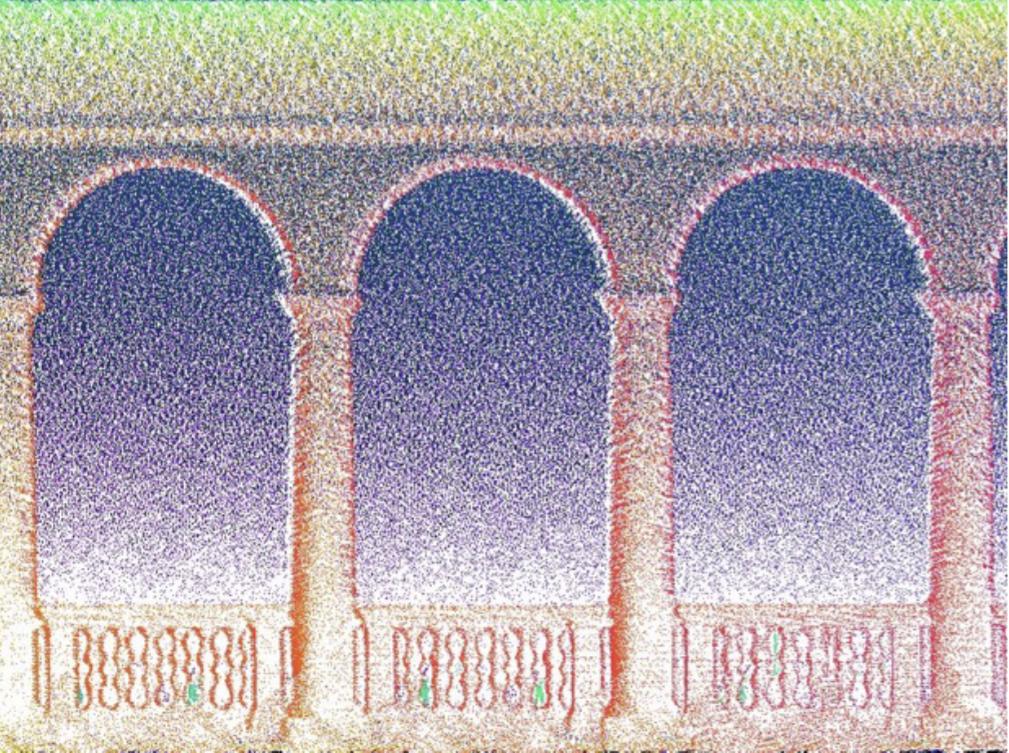
Shuyang Zhang, Jinhao He, Bohuan Xue, Jin Wu, Pengyu Yin, Jianhao Jiao, Ming Liu ICRA, 2024 An image acquisition scheme with image bracketing patterns for complex illumination scenes. |
|
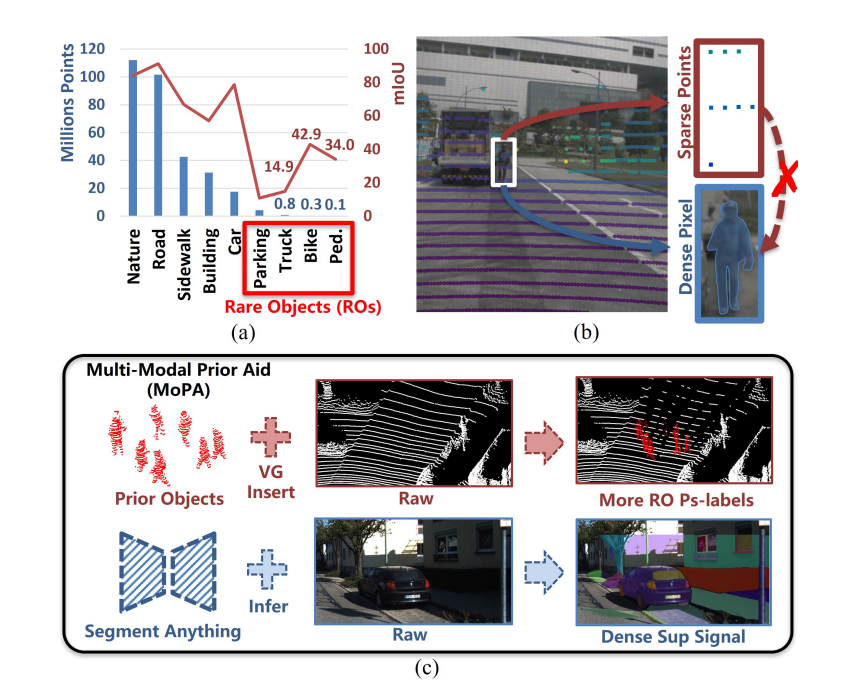
Haozhi Cao, Yuecong Xu, Jianfei Yang, Pengyu Yin, Shenghai Yuan, Lihua Xie ICRA, 2024 Code / arXiv Multi-modal Prior Aided (MoPA) domain adaptation to improve the performance of rare objects in point cloud semantic segmentation. |
|
Xingyu Ji, Shenghai Yuan, Pengyu Yin, Lihua Xie RAL, 2024 Code / arXiv Robust LIO w/ distribution-based representation. |
|
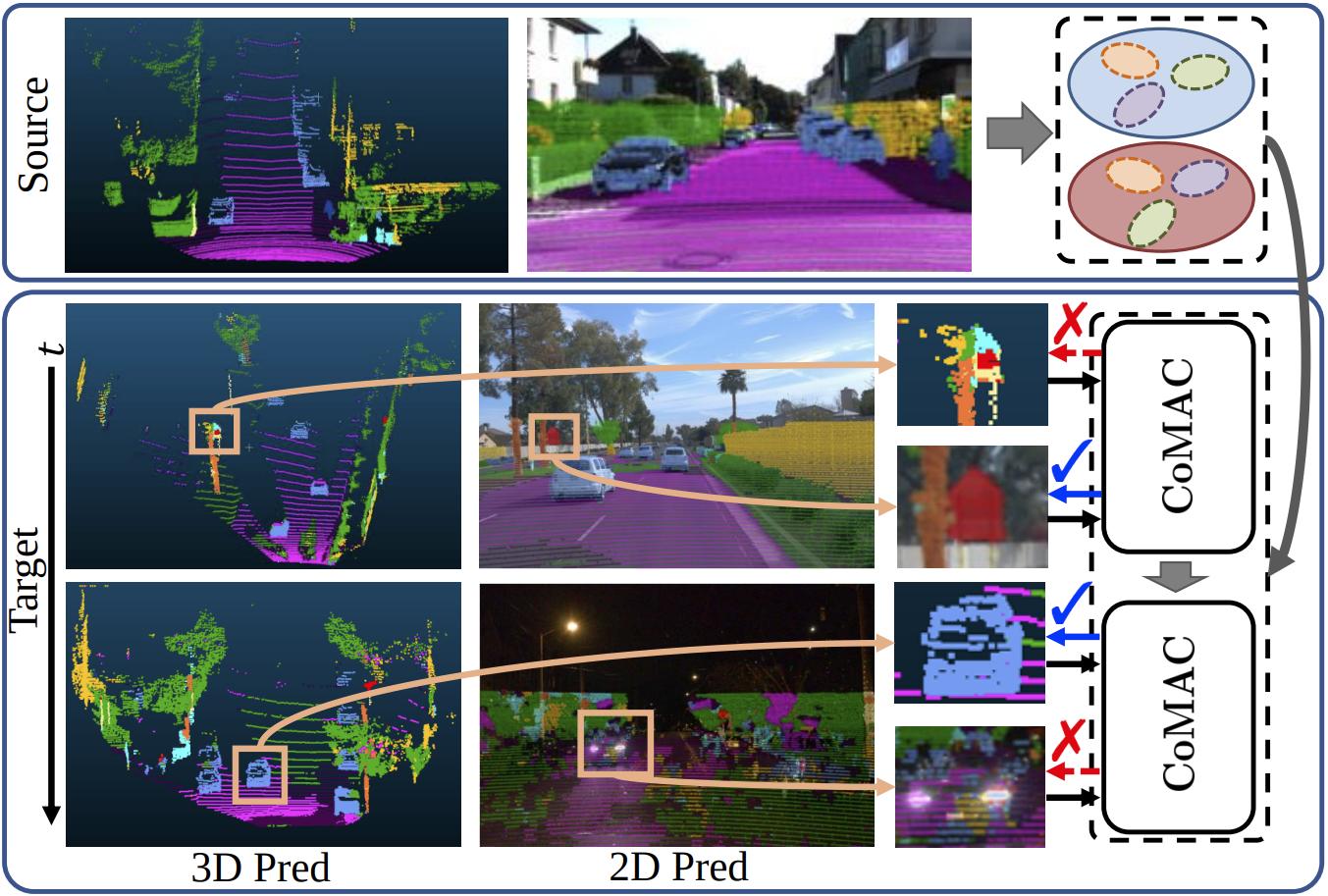
Haozhi Cao, Yuecong Xu, Jianfei Yang, Pengyu Yin, Shenghai Yuan, Lihua Xie ICCV, 2023 arXiv Adaptive cross-modal attending module to achieve reliable 3D segmentation in a continual test-time manner. |
|
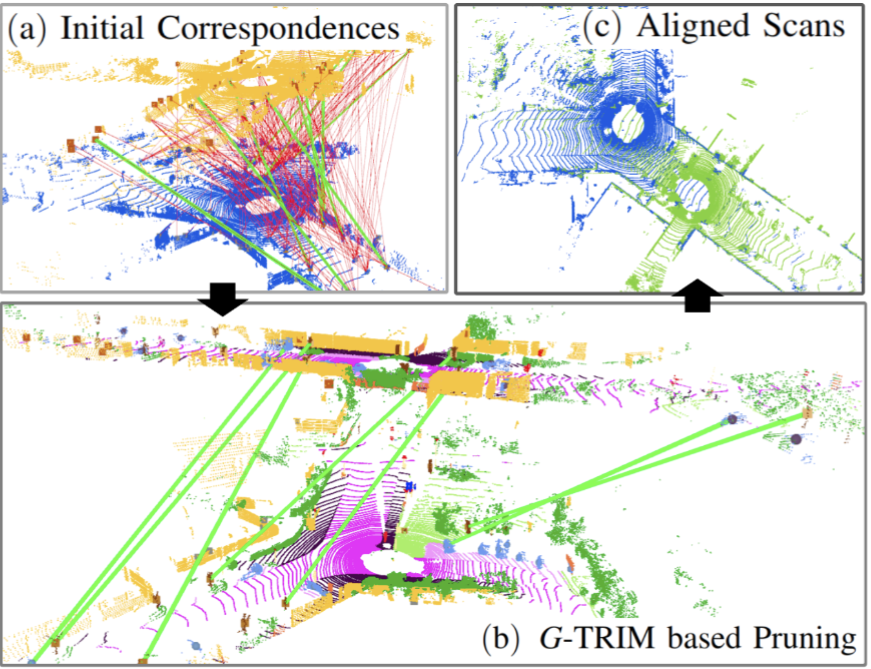
Pengyu Yin, Shenghai Yuan, Haozhi Cao, Xingyu Ji, Shuyang Zhang, Lihua Xie ICRA, 2023 Code / arXiv Combining point features and object level semantics to achive highly efficient outlier correspondence rejection. |
|
Pengyu Yin, Di Wang, Shaoyi Du, Shihui Ying, Yue Gao, Nanning Zheng IROS, 2020 Code / arXiv / video Interprets the liainson between NDT and ICP with a special kind of M-Estimator (Correntropy) from a statistical viewpoint. |
|
Source code and template adapted from Jon Barron. |